This year I participate to Concordia robowars competition. It was very fun!
work in progress
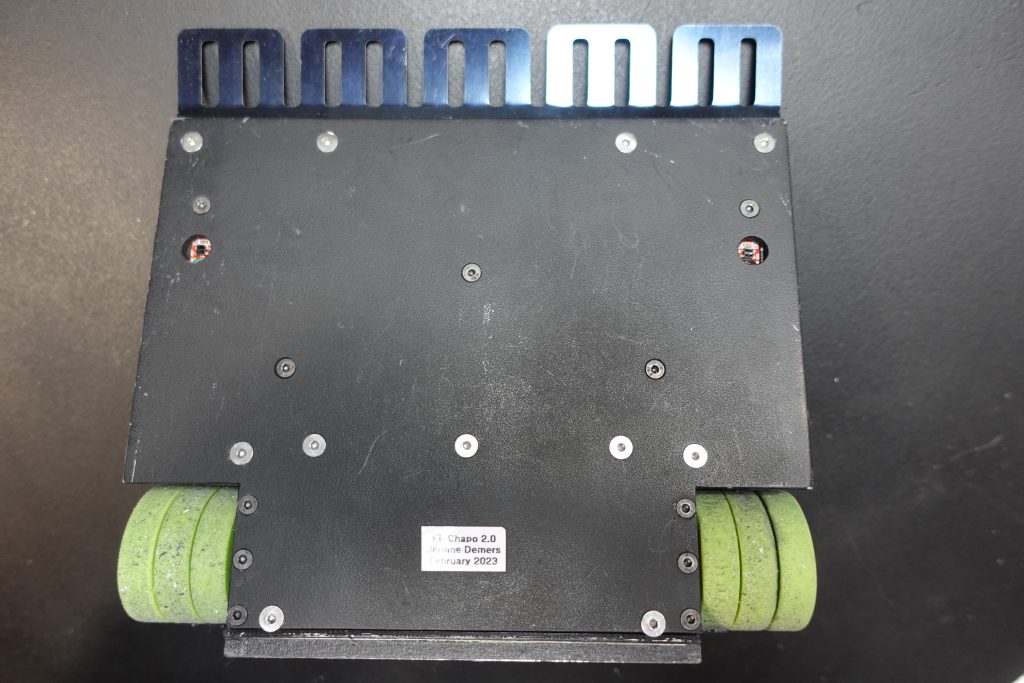
In 2015 my sumo robot call El-Chapo did well. I won first place. There was improvement to be done to make it better. I took the time to modify and created El-Chapo 2.0
software
- when detect opponent on it’s side turn faster. Previous version was too slow and opponent was able to get to me faster than me. It was arcing to turn and now doing a zero turn radius and much faster.
hardware
- new sensors – industrial long range and reliable sensor
- new chassis – lower CG
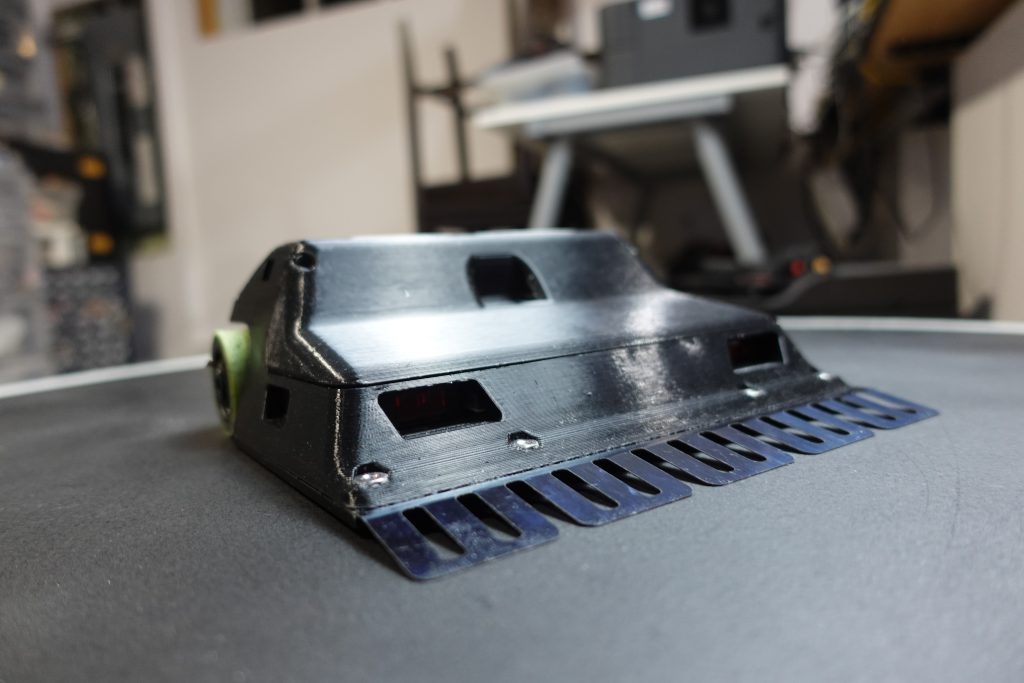
- new blade – experimental front scoop
- fabric on robot to absorb infrared light
- remote control
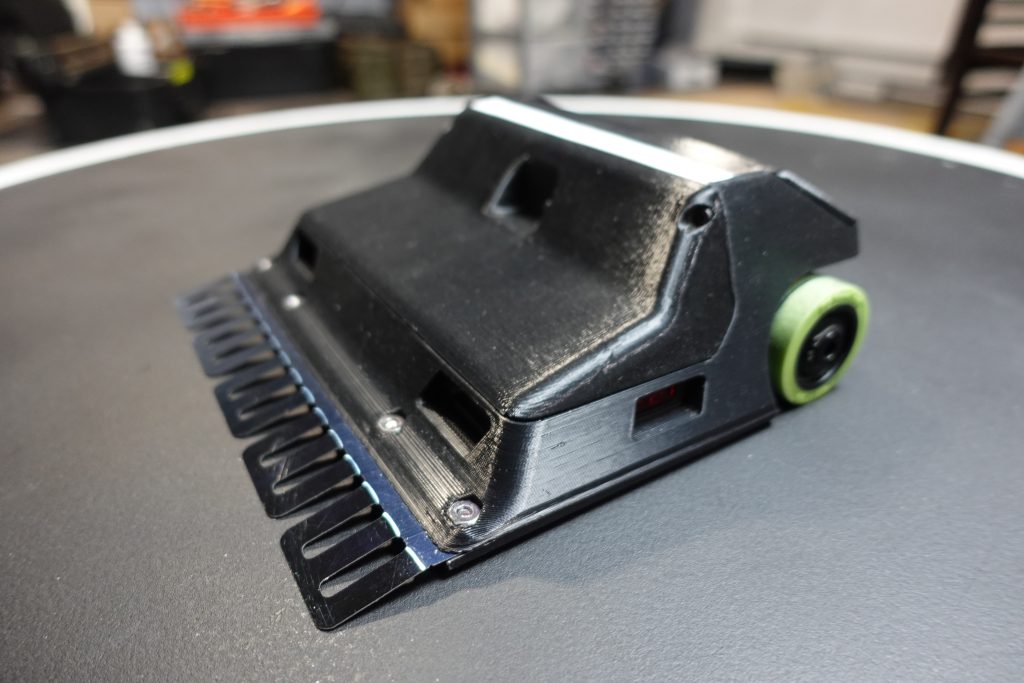
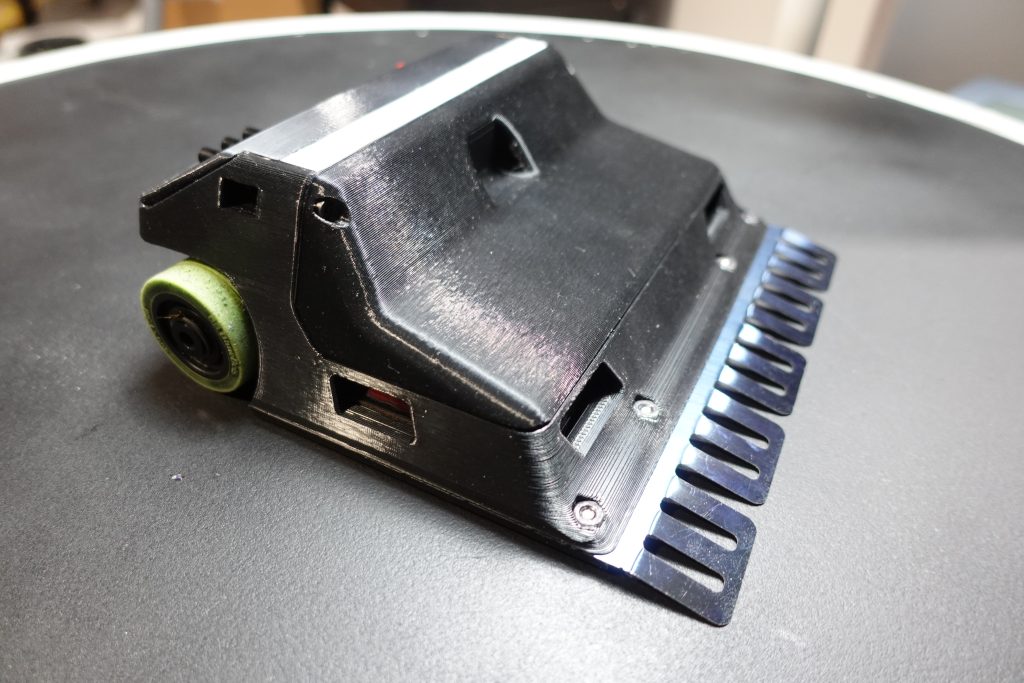
Here is El-Chapo 2.0
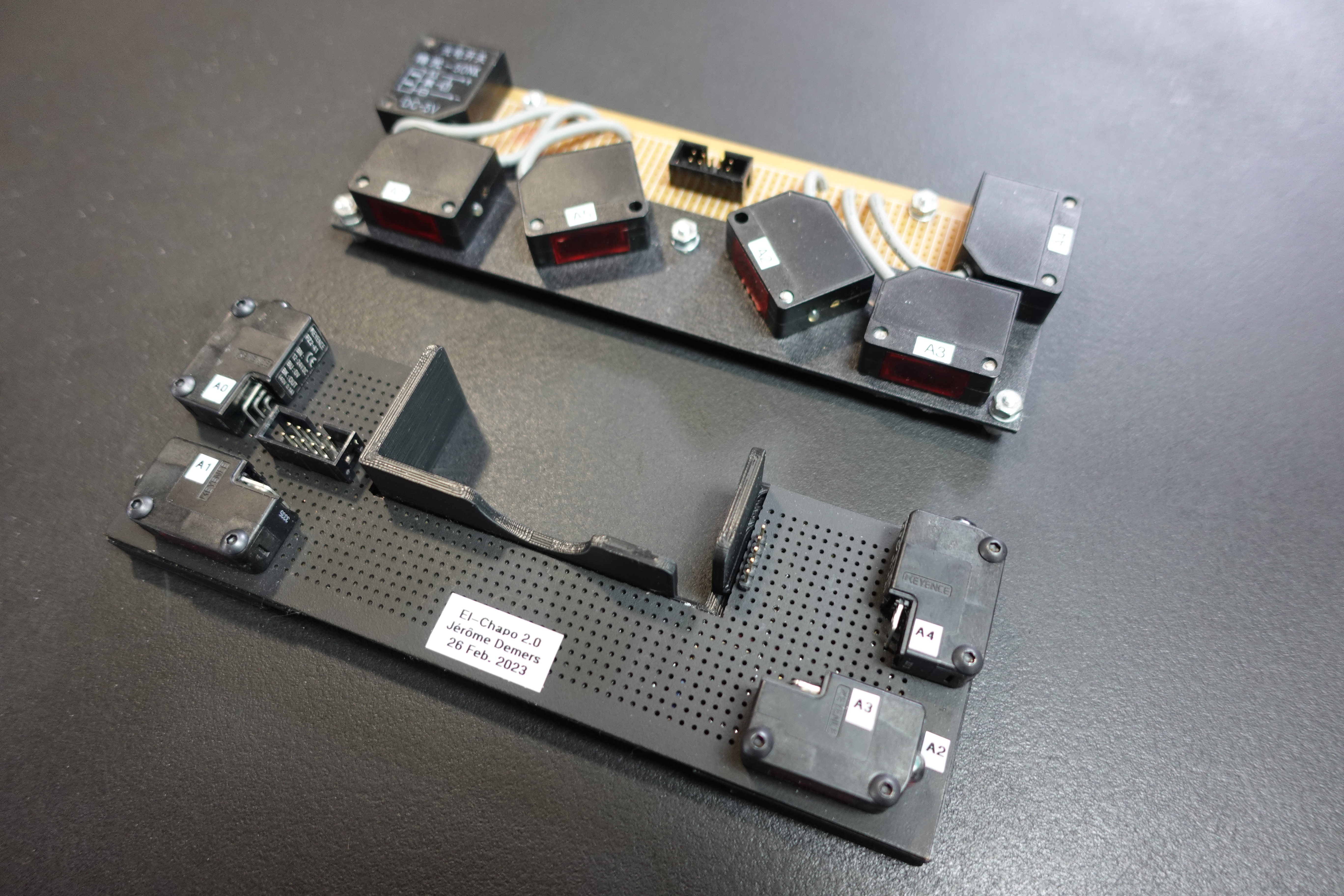

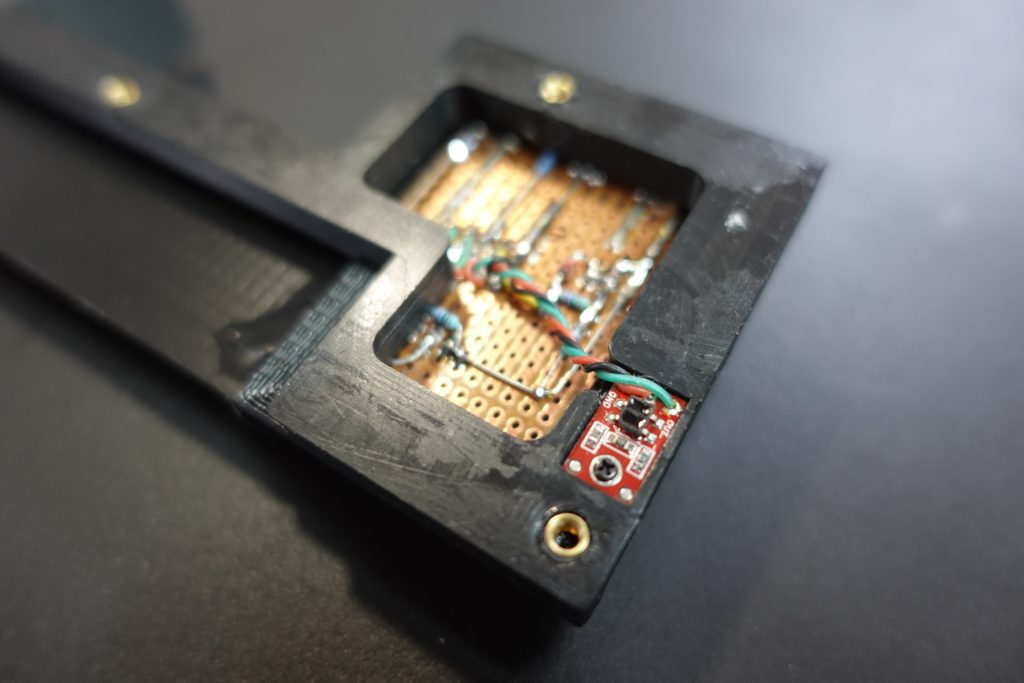
Sensors
Infrared sensors are important, that is how you find and opponent. I decided to use Keyence digital ON/OFF industrial sensor. Very reliable and work on dark colors really well.
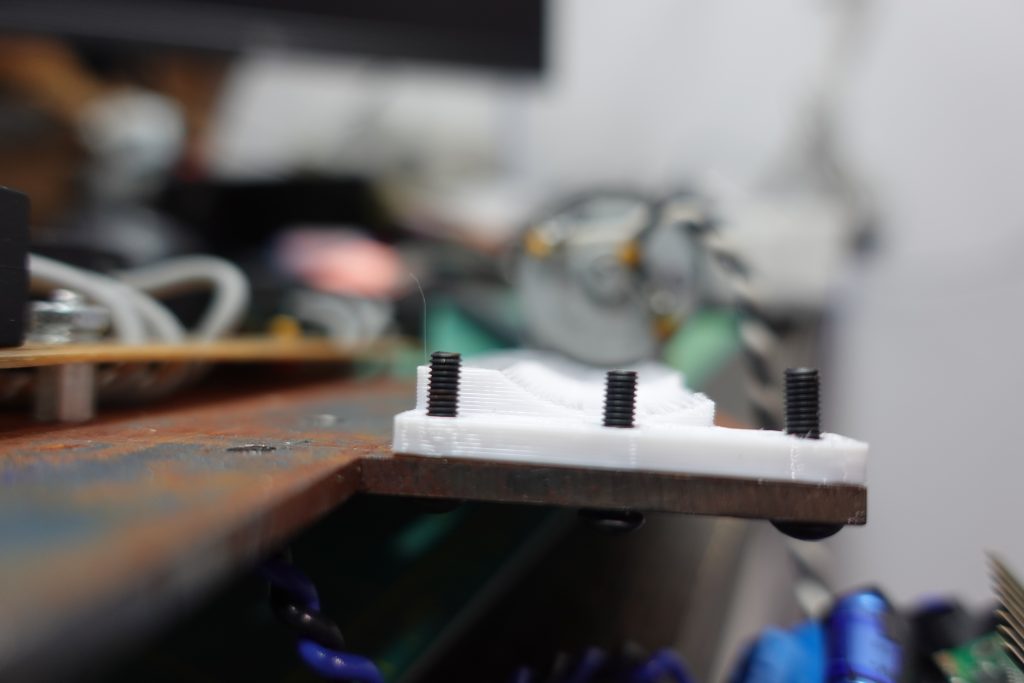
I design a 3D printed bracket to hold the proto board and the same time secure the lipo batterie
The 3D printed parts is also a spacer and holds the white line detector
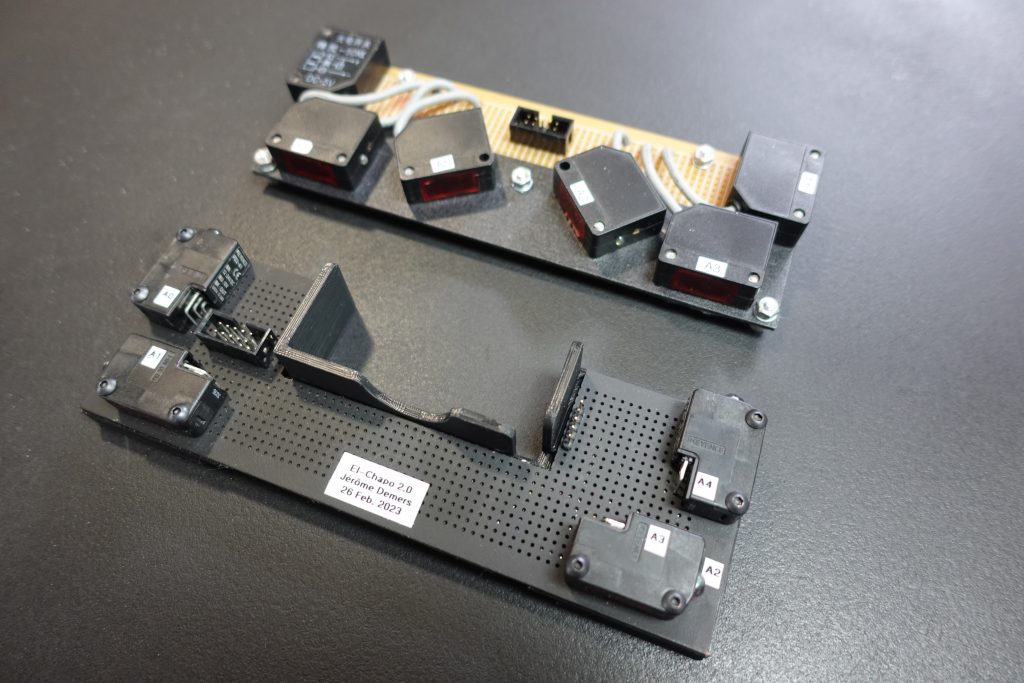
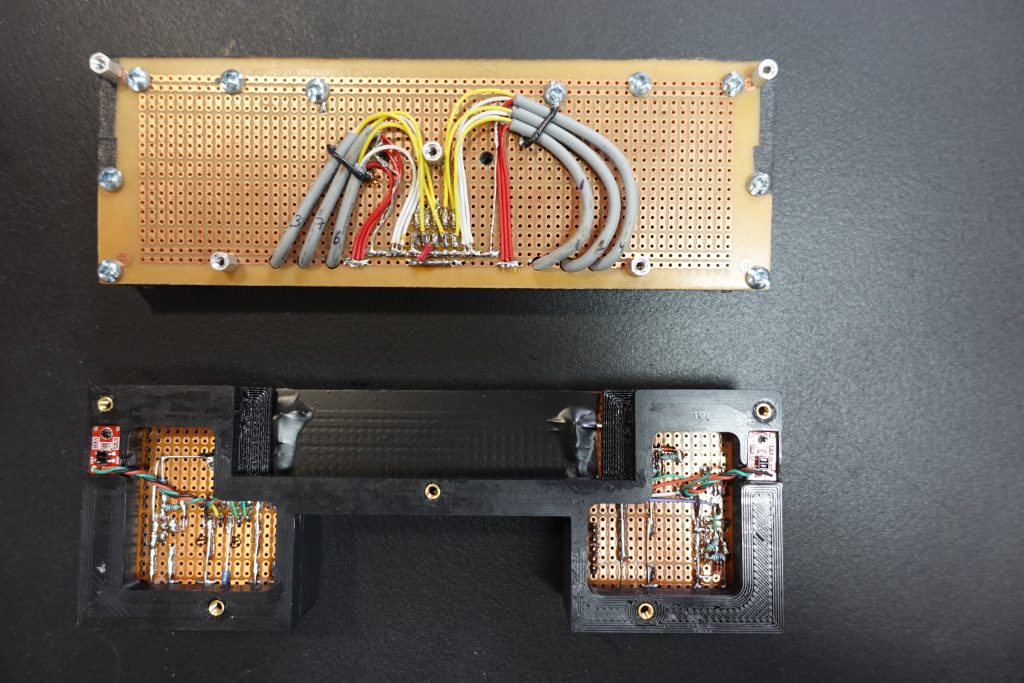
Here is the old vs new design
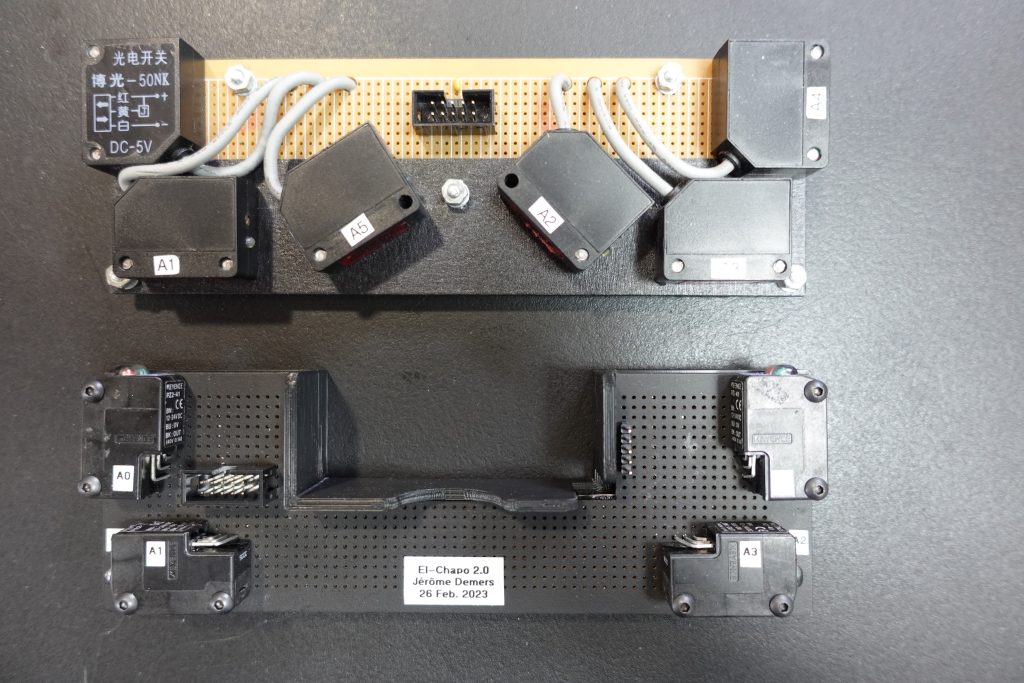
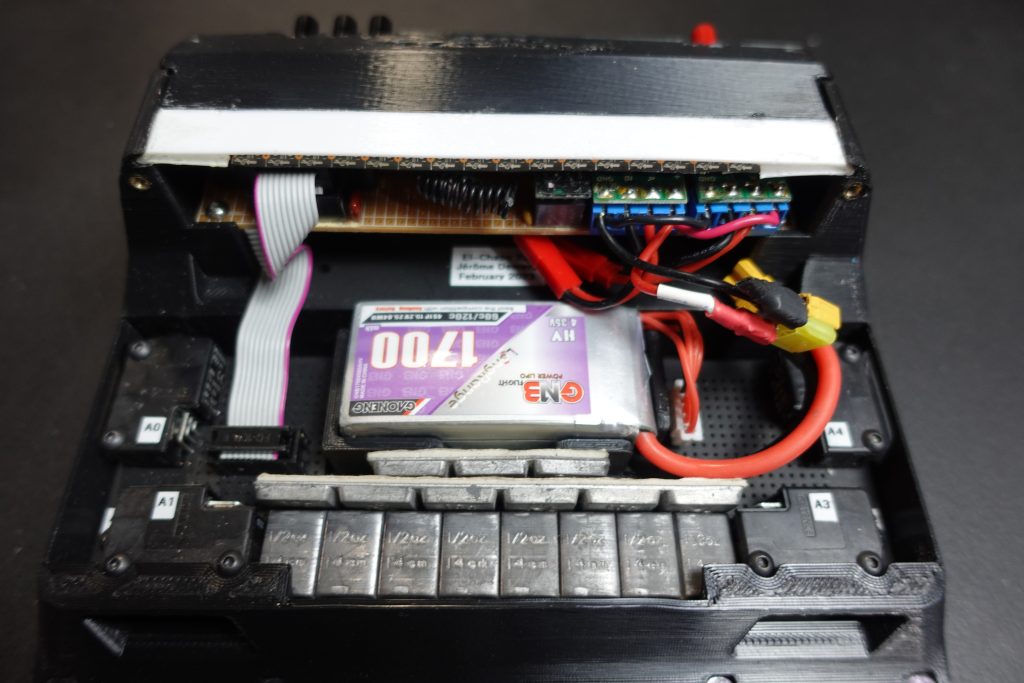
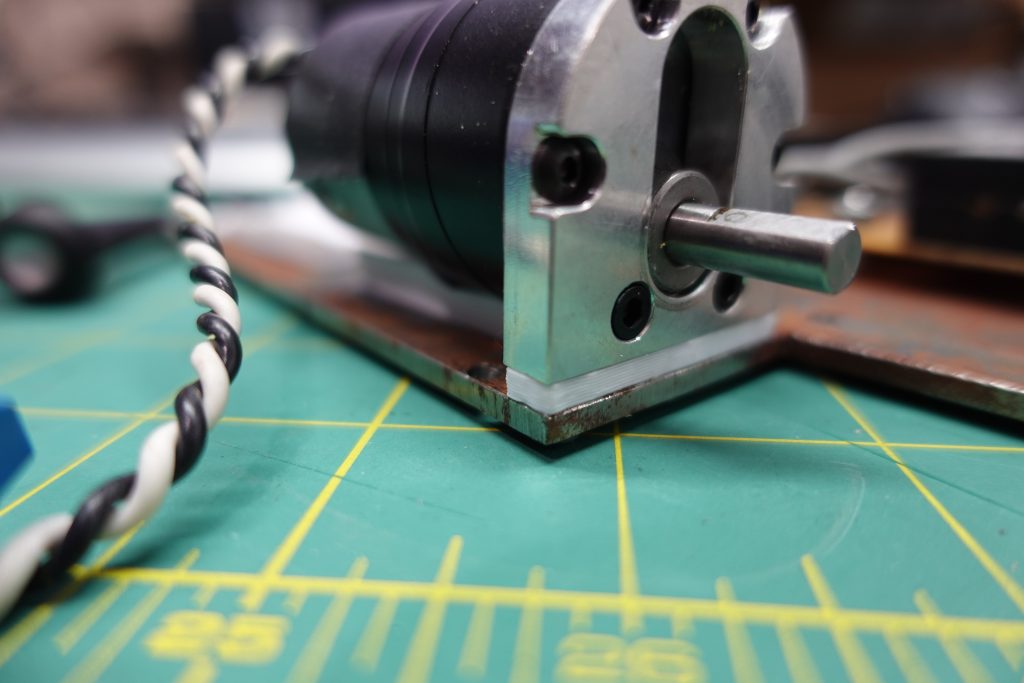
Lower the CG
You can see light under the robot, so I decided to lower the entire robot to make sure the CG is lower. This is pushing game, you want every details to be optimized.

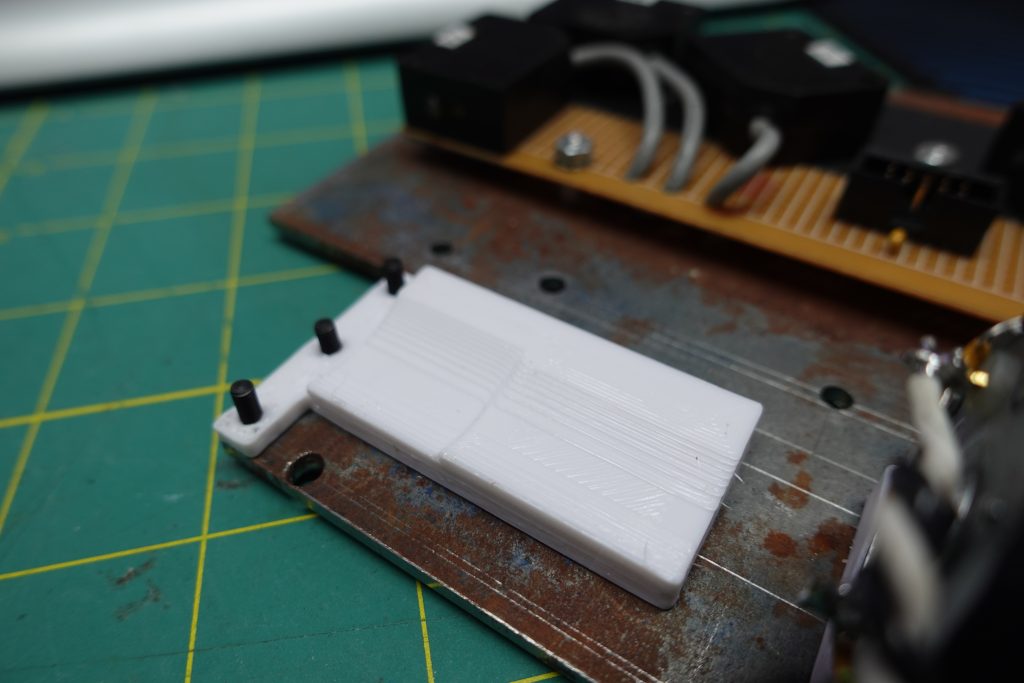
Here is is after the modification

To make this happen, I had to make spacer.
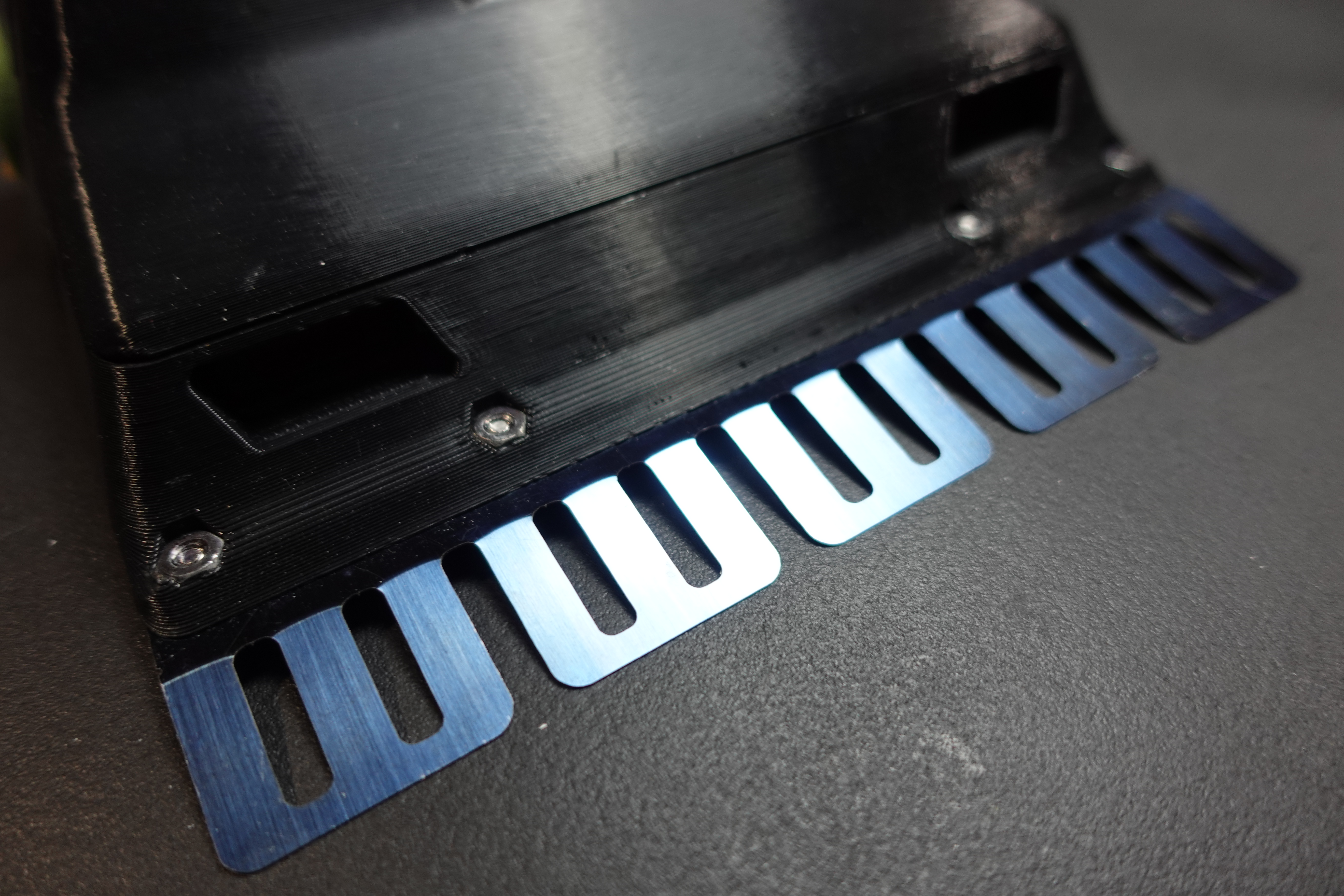
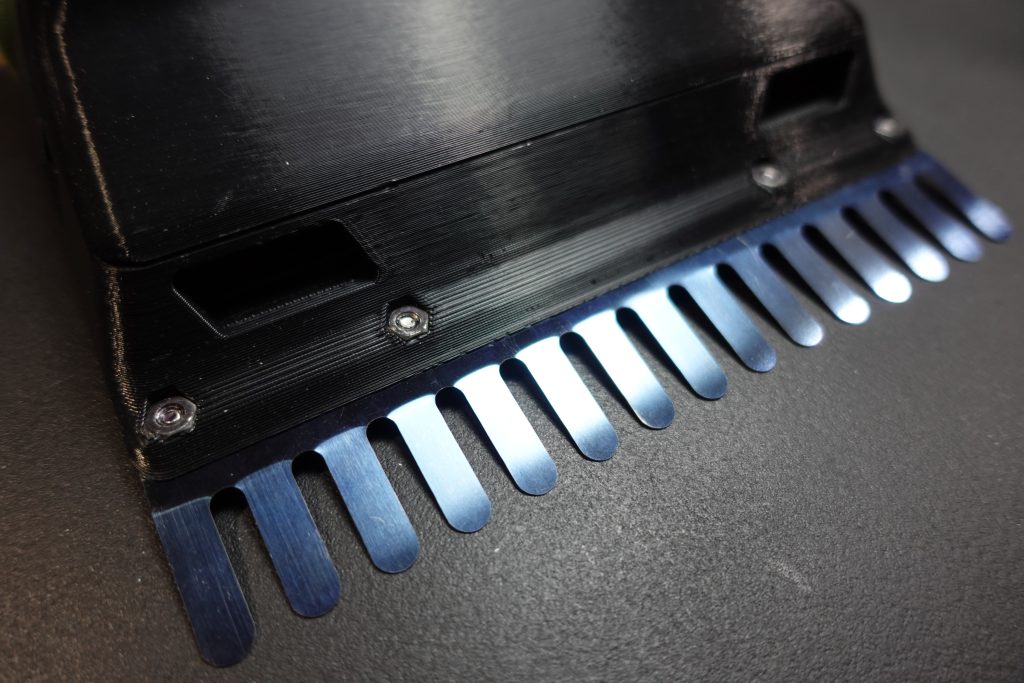
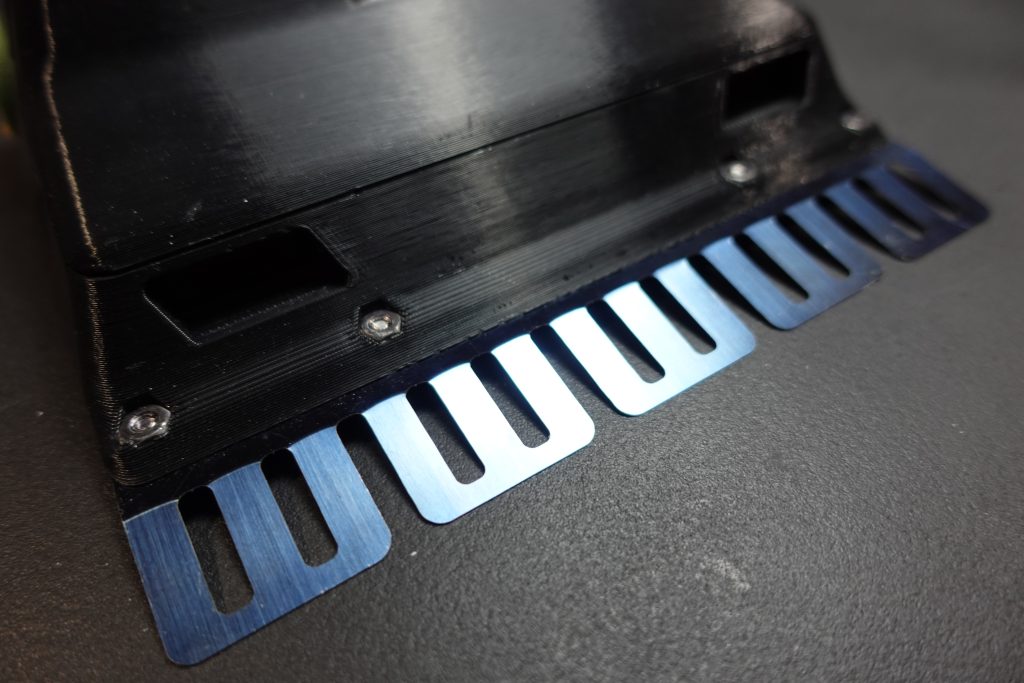
New Wedge design
I had this idea for long time and was not sure it was a good idea. Blue spring steel for the edge. Can I make a stiff but flexible front wedge? I quickly did some design on paper, then 3D printed them. Super hard to prototype so I had to use sendcutsend service to get it made. It does work great.

RF remote
Did I tell you I had issues with my 315Mhz remote control kills switch?
This robot move at a good speed on the ring and to stop it, you normally place your feet and the robot hit, then you can grab it and turn it off. A remote control is the answer. Typically we use infrared remote but I had issues with my neopixel library and the IR remote. Timer issue so could not make that IR remote work. I then use a RF remote that had laying around. It works great on the bench and the motor stops immediately. But once on the arena, it does not work at all, I need to place the RF remote really close and sometimes it works.
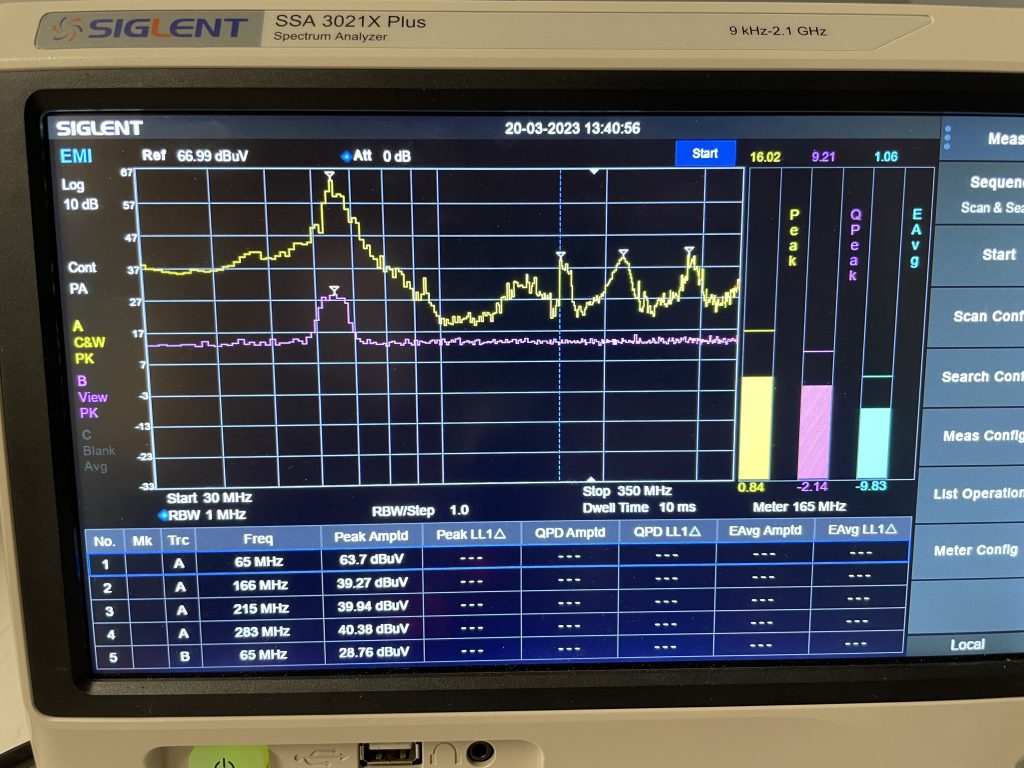
I decided to bring to work and place it under the spectrum analyzer.
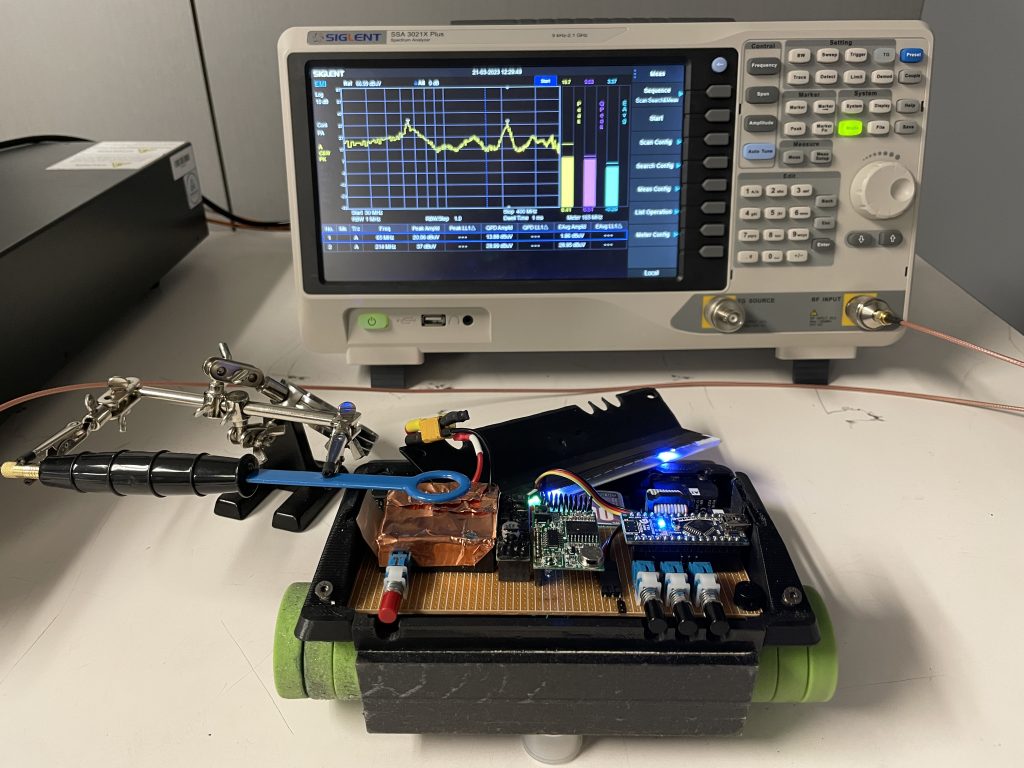
I had some harmonic and noise near 283Mhz coming from my motor wires. This explain why my RF did not work correctly. Also note that this setup is not perfect, did that during lunch break and had to learn to use the spectrum analyzer.
While I had the setup, I added shield over motor controller using copper tape (made sure the glue is conductive). I thought it was the ESC but I believe it’s the actual wires going to the motors.
As I add this copper tape, I short Vbat to the 5V rail of my circuit board!!
Burn a speed controller 3 days before the event!
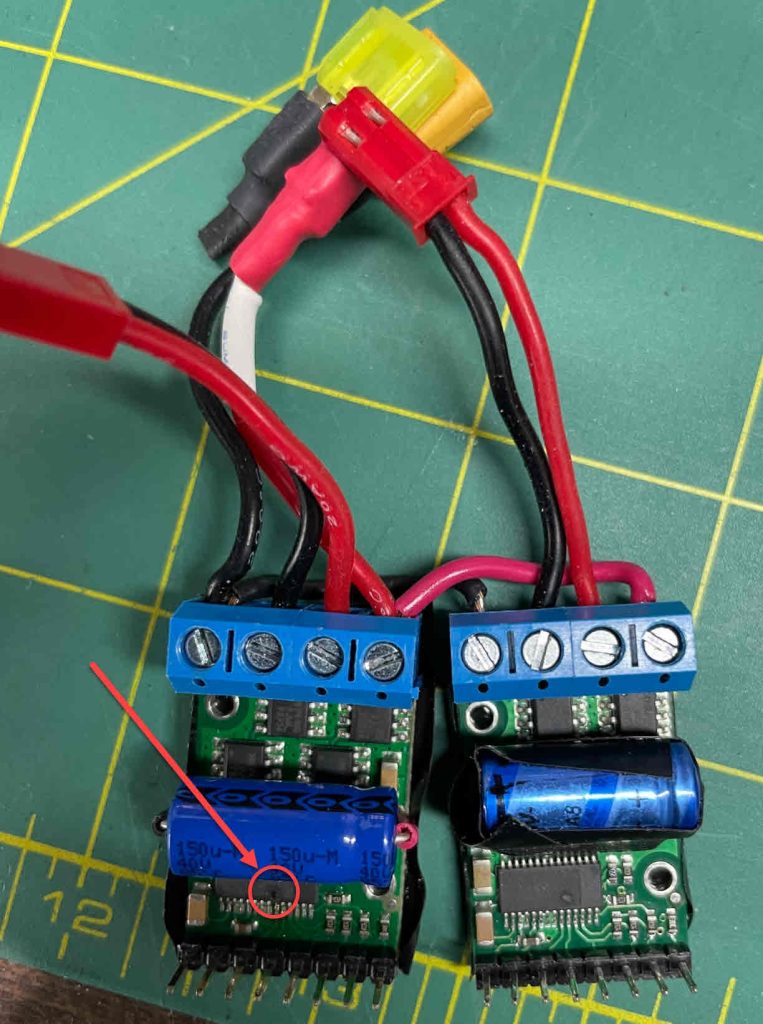
I was able to fix it, I desoldered the chip and replace it with another one. Pololu did not want to tell me the part number. So I had to cannibalize a other bigger board to get that chip.
I won first place like you saw in the video. Here is a shot with some of the competition.
